


自動運転分野では、「セカンダリ・アクティビティ」や「DMS」(ドライバーモニタリングシステム)、「EDR」(イベントデータレコーダー)、「HMI」(ヒューマンマシンインタフェース)、OTA(オーバー・ジ・エア)などさまざまな用語が日常茶飯事に飛び交う。
他の分野と共通した意味を持つ用語もあれば、自動運転分野特有の用語や独特な解釈を持つ用語も存在する。自動運転レベル4の実証やレベル3で登場する「オーバーライド(override)」もその1つだ。
override自体は「乗り越える」「優先する」などと訳されることが多いが、自動運転分野ではどのような意味を持つのか。この記事では、自動運転分野におけるオーバーライドの定義とともに、その中身に迫っていく。
記事の目次
■自動運転におけるオーバーライド
国土交通省が所管する先進安全自動車(ASV)推進検討会によると、自動運転におけるオーバーライドは「強制介入」を意味し、「人と人、人と機械(システム)、機械(システム)同士が相反する作動状況に陥った場合、どちらかを優先すること」と解説している。
▼新聞、雑誌等でよく使われている自動運転関連用語の概説|国土交通省
https://www.mlit.go.jp/jidosha/anzen/01asv/resourse/data/yougo.pdf
これを「自動運転システム」と「手動運転」に置き換えると、大きく4つのパターンが考えられる。
パターン1:自動運転システムから手動運転への切り替え
1つ目は、自動運転システムから手動運転に切り替えるケースだ。例えば、自動運転システムで走行中、何らかの障害により自動運転が困難となった際、優先的に手動操作に切り替えて運転を継続するケースなどがこれにあたる。大半のケースがこの1つ目のオーバーライドに含まれる。
パターン2:人から自動運転システムへの切り替え
2つ目は、その逆となる人から自動運転システムに切り替えるケースだ。このケースは自家用車において自動運転機能を有効活用する場合に考えられる。普段は従来通りの手動運転を楽しんでいるが、ドライバーに何らかの障害が発生して手動運転が困難となった際、ドライバーモニタリングシステムがその状態を把握し、自動運転機能によって走行を継続するか、路肩などに安全に停車せるケースなどがこれに相当する。
パターン3:自動運転システムから自動運転システムへの切り替え
3つ目は、自動運転システムから自動運転システムへの切り替えだ。これは、同一の車両に複数の自動運転システムを搭載しているケースが相当し、使用中の自動運転システムから別の自動運転システムに切り替えるといったパターンが考えられる。
パターン4:手動運転から手動運転への切り替え
4つ目は、人から人、つまり手動運転から手動運転へ切り替えることを指すが、自動運転においてはこのパターンを考慮する必要はなさそうだ。
■「道路運送車両法」の細目でもオーバーライドを定義
2020年4月施行の改正道路運送車両法では、レベル3の社会実装を可能とするため保安基準対象装置に自動運行装置が追加された。またこれに付随する形で、自動運行装置の作動状態の確認に必要な情報を記録する作動状態記録装置も設置が義務付けられている。
そして作動状態記録装置については、「動運行装置の作動中に運転者が、かじ取装置又は制動装置若しくは加速装置の操作装置への操作によりオーバーライドした時刻」などについて、特定可能な情報を保存できることが求められている。
そしてここで言うオーバーライドの定義としては「自動運行装置の作動中における、当該装置による前後方向及び横方向の制御に優先し、運転者の操作により車両が制御されること」と記されている。
つまり、現状の法律(道路運送車両法)においては、レベル3を前提に自動運転システムから優先的に手動運転を行い、車両を制御することをオーバーライドと位置付けているのだ。
手動運転から自動運転システム、あるいは自動運転システムから別の自動運転システムへの移行は対象とされていないが、近い将来、レベル4を解禁する法改正が行われた際にこのオーバーライドの定義も拡大されるものと思われる。
【参考】自動運転車の安全基準については「自動運転車の「安全基準」を徹底解説!国交省、ステッカーデザインも策定」も参照。
自動運転車の「安全基準」を徹底解説!国交省、ステッカーデザインも策定 https://t.co/WvavA8FCa4 @jidountenlab #自動運転 #安全基準 #ステッカー
— 自動運転ラボ (@jidountenlab) April 3, 2020
■レベル3におけるオーバーライド
現在の開発状況下では、自家用車におけるレベル3と、無人走行を可能とするレベル4サービス、及びその実証におけるオーバーライドが圧倒的多数を占める。
「高速道路における渋滞時」など一定の条件下で自動運転を可能とするレベル3は、システムが自動運転継続困難と判断した際、ドライバーに対し手動運転への切り替えを要請する「テイクオーバーリクエスト」を発する。この要請にドライバーが応じることがオーバーライドだ。
レベル3は自動運転を可能とする条件「ODD(運行設計領域)」が比較的狭く、主たる運転者はあくまで人間のドライバーとなるため、オーバーライドは日常的に発生する。
【参考】自動運転レベル3については「自動運転レベル3とは?定義や開発状況を解説 ホンダが先行、トヨタは?」も参照。
★情報更新しました★自動運転レベル3とは?定義や開発状況を解説 ホンダが先行、トヨタは? https://t.co/GXqhbmAipw @jidountenlab #自動運転 #レベル3 #トヨタ #ホンダ
— 自動運転ラボ (@jidountenlab) September 8, 2021
■レベル4におけるオーバーライド
無人運転を可能とするレベル4では、運転の主体が自動運転システムに置き換わり、ODD内においては基本的にドライバーに頼らない自動運転機能が求められる。
手動運転と自動運転の両方が共存するレベル3と異なり、レベル4は可能な限りオーバーライドが発生することがないよう開発・設計が進められることになる。ただ、発展途上中の技術のため何らかの形で手動介入を必要とする場面は少なくない。
特に、実証においては自動運転システムの不具合や危険が予測される場面などでオーバーライドすることが多く、社会実装に向け改善が必要なポイントとしてしっかり注目しなければならない。
■オーバーライドの具体例
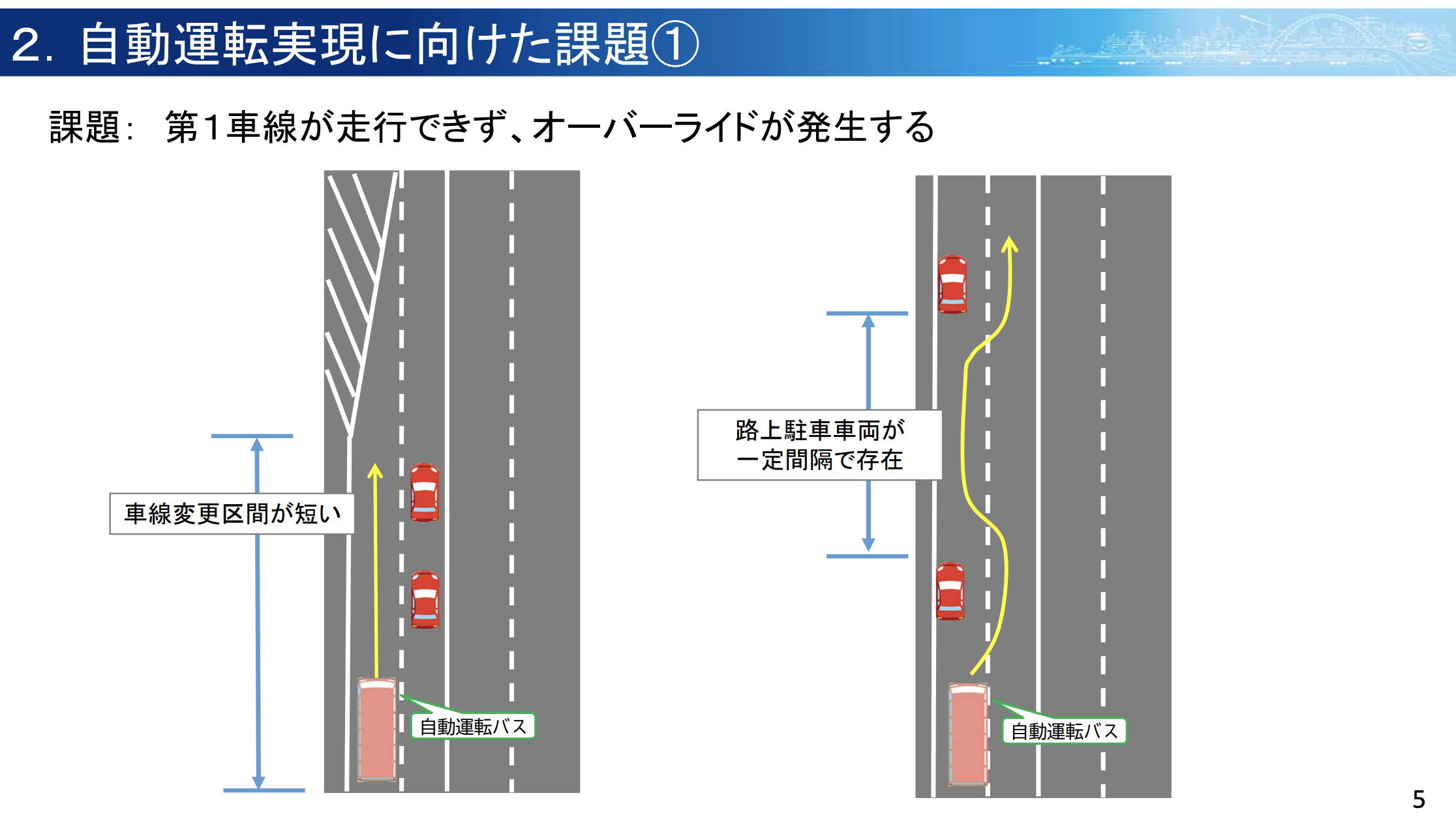
車線変更時のオーバーライド
自動運転の公道実証において、最も手動介入を要するのが路肩の駐停車車両だ。車両をかわすために車線変更、あるいは対向車線にはみ出す必要がある。特に、一定間隔で駐車車両が存在する場合などは手動介入必須となることが多い。
また、車線減少などで隣の車線に移る際も、当然ながら後続車両に気を遣う。変更先の車線を走行する一般車両の台数が多ければ、念のためオーバーライドして対応するケースもあるようだ。
自動運転車の走行ルートにおける厳格な駐停車規制や自動運転車優先走行ルールの徹底、V2V(車車間通信)技術の確立など、さまざまな観点から対策を講じていく必要がありそうだ。
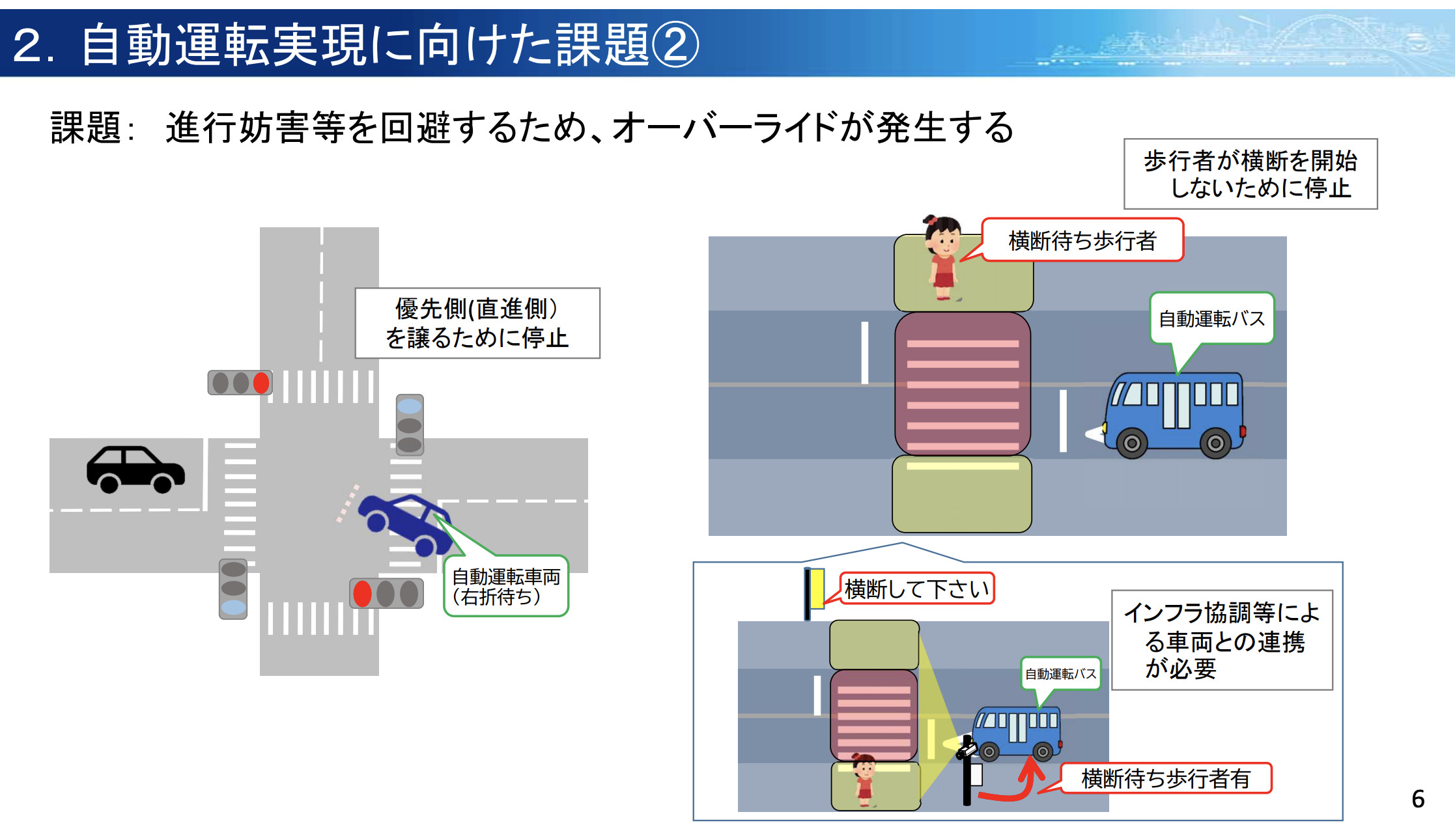
交差点におけるオーバーライド
交差点においては、自動運転車が右折する際に特に注意が必要だ。対向車線から直進してくる車両や右折先の横断歩道の状況を把握し、安全なタイミングで進行しなければならない。信号のない横断歩道などでも、横断待ちの歩行者がいる際自動運転車は一時停止するが、双方が相手の出方を待ち膠着状態に陥ることも考えられる。
出典:日本信号/警察庁公式サイト(タップすると拡大できます) ※日本信号は警察庁の「令和3年度自動運転の実現に向けた調査検討委員会」において、自動運転実現に向けた課題の1つとしてオーバーライドに関する点を挙げている。上記の画像はこの調査検討委員会で示された資料に含まれるものだ。
V2VやV2I(路車間通信)など、道路利用者とコミュニケーションを図る仕組みの構築などが求められそうだ。
周囲の車両のイレギュラー走行によるオーバーライド
イレギュラーというと大げさだが、例えば後方車両が追い越しをかけ、前方に出た後に急ブレーキを踏むケースや、対向車線における追い越し車両の近接、道路脇の駐車場からバックで道路に出てきた車両への対応、緊急車両の近接、逆走する自転車への対応など、道路交通社会においてはさまざまなケースが想定される。
手動運転において注意を要する場面は、自動運転車においてはその何倍もの注意を要することになる。周囲の協力が必須となるため、自動運転走行区間であることの周知と理解を徹底する必要がありそうだ。
天気の変化によるオーバーライド
急な土砂降りや降雪の影響などでセンサーが周囲の状況を認識しきれなくなるケースなどもある。また、積雪や大きな水たまりなどが道路上の障害物となるケースなどもありそうだ。
天候条件も基本的にODDに設定されており、こうした自然現象の影響はレベル4サービス確立後も発生するものと思われる。
その他のオーバーライド
このほか、道路脇に設置されたカーブミラーを障害物として検知したケースや、道路上をホースが横切っていたため手動介入したケースなどもあるようだ。
センサーや解析システムの精度向上が求められる部分でもあるが、刻一刻と状況が変わる道路においては、実証段階で可能な限り多くの経験を重ね、一つひとつの障害物やイレギュラーをつぶしていかなければならない。
【参考】公道実証における手動介入要因については「自動運転、「路上駐車」が最大の障害!手動介入の要因で首位」も参照。
自動運転、「路上駐車」が最大の障害!手動介入の要因で首位 https://t.co/2CZ6cLp04B @jidountenlab #自動運転 #路上駐車 #手動介入 #分析
— 自動運転ラボ (@jidountenlab) June 1, 2021
■【まとめ】オーバーライド要因の解消が自動運転実用化への道
誤解のないように、上述したオーバーライド例に対し、自動運転車がまったく対応できないわけではない。万が一を想定し、安全面を考慮の上オーバーライドしているケースが大半を占めている。
こうした万が一を1つずつ解消していく作業が公道実証だ。自動運転システムの高度化を図っていくとともに、インフラに求めるべき点、道路利用者に求めるべき点などを浮き彫りにし、地域と協力しながら解決策を講じていかなければならない。
自動運転の早期実用化において、オーバーライド要因の解消は避けては通れない道なのだ。
【参考】関連記事としては「自動運転とは?技術や開発企業、法律など徹底まとめ!」も参照。
")
")
とは?(2024年最新版)")




 コネクテッドや自動運転を示す自動車業界ワード")
が可能な車種一覧(2024年最新版)")
")
")